頂柱科技最新動態(tài),傳遞科技的魅力
激光跟蹤儀和SpatialAnalyzer在航空航天中的應(yīng)用
確定組件(DA)是一種用于航空航天組件的技術(shù),其需要鉆孔精確且匹配的孔圖案以用于緊固配合部件。DA技術(shù)對于有效地為航空航天構(gòu)建大型結(jié)構(gòu)至關(guān)重要,因為它允許一致,準(zhǔn)確的裝配和部件對齊。通常使用大型數(shù)控機床或大型夾具來實現(xiàn)鉆孔DA孔圖案所需的精度,但這些方法既昂貴又不靈活,無法改變設(shè)計和工藝。另一種技術(shù)是使用大型精密計量系統(tǒng)在軌道上使用機器人。該技術(shù)允許在能夠適應(yīng)設(shè)計和工藝變化的單元中精確鉆孔DA孔圖案。
該項目將激光跟蹤儀與機器人集成在一起,以開發(fā)和解決機器人的運動學(xué)校準(zhǔn),并將激光跟蹤儀測量結(jié)果整合為控制鉆頭位置和方向的反饋。該項目的目的是評估柔性機器人系統(tǒng)是否能夠在航空航天公差范圍內(nèi)提供精確的DA孔模式。
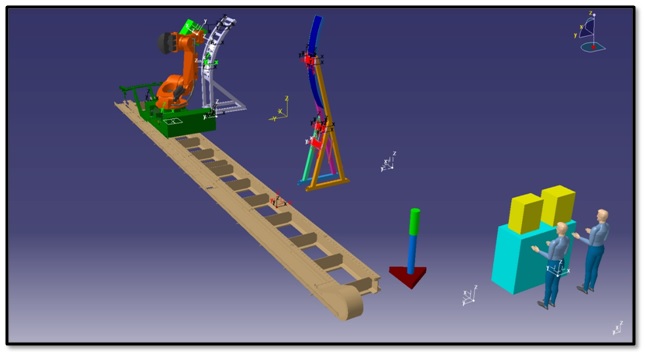
該項目使用了以下組件:Kuka KR-500,Leica AT901,Leica T-Mac 6D傳感器,30'平移軌道,機身試驗臺和優(yōu)惠券,以及用于直接機器人控制界面的SpatialAnalyzer(SA)機器,激光跟蹤器界面和測量計劃(MP)以自動化該過程。
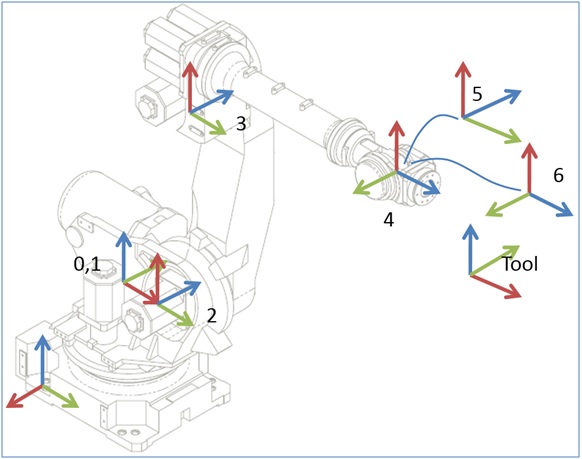
SA Machine用于集成并建立與機器人和激光跟蹤器的實時連接。SA機器人驅(qū)動程序與Kuka控制器連接,提供直接通信以讀取和命令聯(lián)合值。該解決方案使用跟蹤器測量和機器人關(guān)節(jié)角度值,當(dāng)機器人通過DA孔圖案內(nèi)部和周圍的一系列姿勢移動時測量,并將這些測量值用作局部校準(zhǔn)的輸入。
校準(zhǔn)使SA機器能夠計算每個DA孔位置的最佳關(guān)節(jié)角度。SA機器通過直接命令最佳關(guān)節(jié)角度來繞過機器人的運動學(xué),以實現(xiàn)DA孔精度。直接機器人界面使MP能夠使用跟蹤器測量來微調(diào)機器人在每個DA孔處的鉆頭位置。這種閉環(huán)反饋過程稱為“移動測量- 糾正”。
將機器人發(fā)送到目標(biāo)框架后,使用T-Mac測量機器人的實際位置。計算實際幀和目標(biāo)幀之間的差異,并將其用作新增量機器人移動的輸入。最終結(jié)果是精確定位機器人鉆頭以鉆每個DA孔。
在項目結(jié)束時,結(jié)果表明SA機器能夠?qū)⒓す飧櫰髋c機器人一起使用,以提供靈活的確定孔鉆孔單元解決方案。此外,還證明了以下兩個步驟:首先,開發(fā)和解決機器人在局部工作區(qū)域的運動校準(zhǔn),其次,將激光跟蹤器測量結(jié)果整合為控制鉆頭位置和方向的反饋。
這項技術(shù)的優(yōu)點包括:
-在感興趣的工作空間內(nèi)進行局部校準(zhǔn)優(yōu)化
-運動校準(zhǔn)包括基于負(fù)載的偏轉(zhuǎn)補償和鉆出每個局部孔圖案所需的姿勢
-能夠挑選和選擇要優(yōu)化的運動參數(shù)
-允許選擇最佳的計量系統(tǒng)來校準(zhǔn)工作單元內(nèi)的機器人
-實現(xiàn)了DA孔圖案的精度和所需公差的顯著改善。相對于使用機器人運動學(xué)的凈差異使用SA運動學(xué)大約好14倍,使用移動,測量,正確技術(shù)大約好40倍。


掃描二維碼,關(guān)注頂柱科技!


